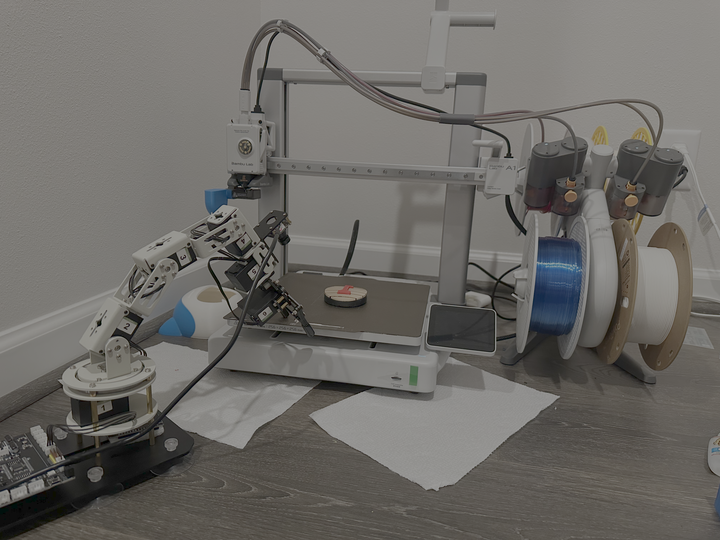
Robotic Arm to Automatically Changing 3D Printer Plates
Adversarial Video Generation
- Design and implement a robotic arm system capable of automatically removing finished 3D print plates (for Bambulab A1C) and replacing them with new ones.
- Implement ROS nodes for motion planning, sensor data processing, and error handling, ensuring robust and reliable system operation.
- Started from self-implemented inverse kinematics algorithms to leverage MoveIt! within ROS to generate smooth and collision-free trajectories for the robotic arm. Working on integrating LLM APIs to the system.